
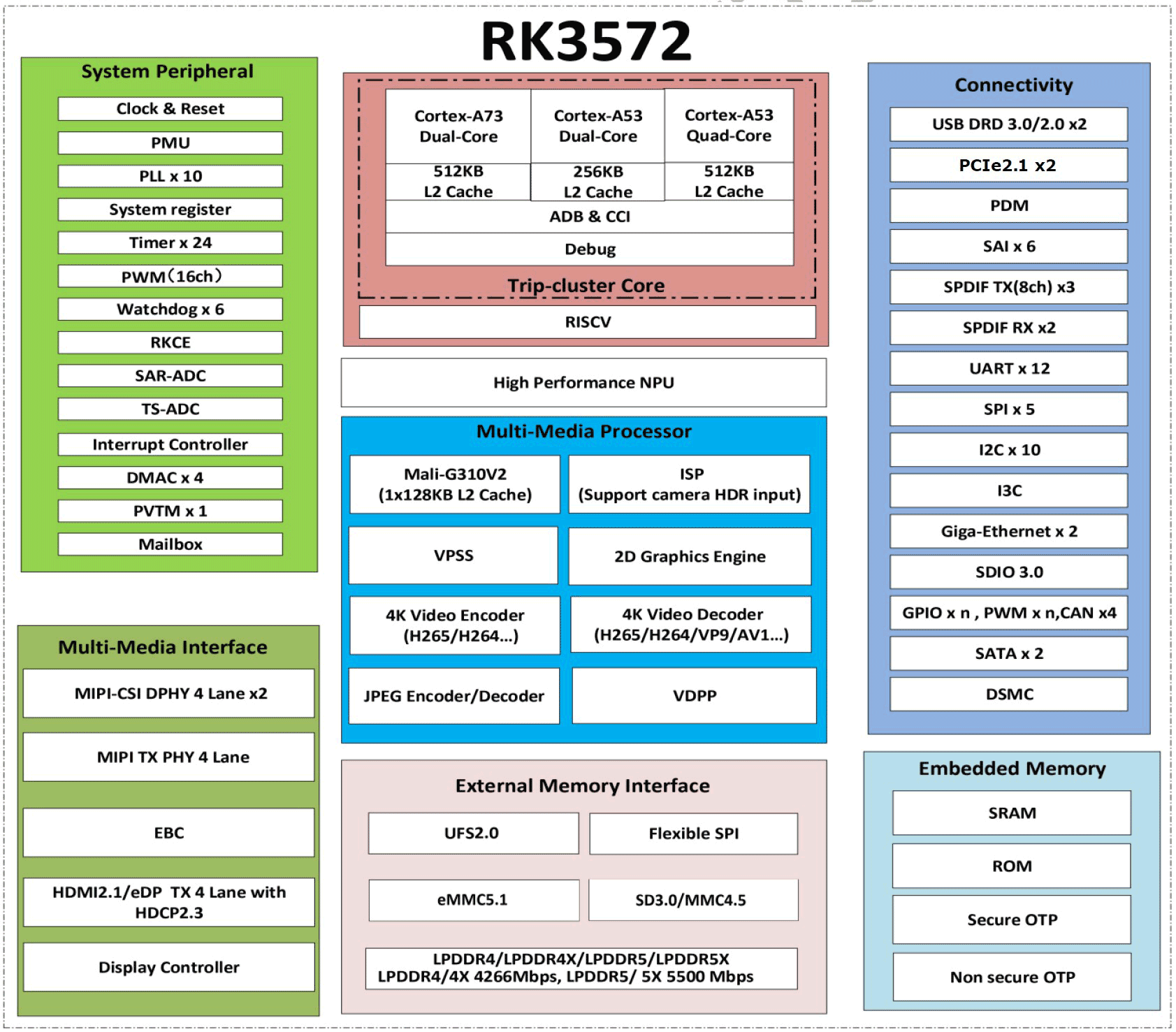
RK3572是一款面向边缘计算和AIoT场景的SoC通用芯片,采用八核CPU设计,自带独立的NPU、ISP、MCU等计算核心,接口十分丰富,完全可以用于机器人嵌入式系统开发,并且在移动机器人(如配送机器人、巡检机器人)和视觉机器人领域具有很强的竞争力。
它不仅提供了机器人所需的通用控制接口,还具备强大的AI算力和多传感器接入能力。以下是基于datasheet文档内容的详细适配性分析:
✅ 核心优势:为什么适合机器人开发?
1. 强大的AI决策与视觉处理能力
机器人最核心的需求是“感知”与“决策”,RK3572在这方面的配置非常出色:
- NPU算力:内置 4 TOPS(INT8)算力的独立NPU。这足以支持机器人运行轻量级的大语言模型(LLM)推理端,以及复杂的视觉算法(如物体识别、SLAM建图、人脸识别)。
- ISP图像处理:集成 1200万像素 高性能ISP,支持3A算法(自动对焦、白平衡、曝光)和畸变矫正(LDCH/LDCV)。这对于机器人的视觉导航(VSLAM)和环境感知至关重要。
- 多摄像头支持:支持 2路 MIPI CSI 接口(每路4 Lane),可以同时接入深度相机(如双目/TOF)、环视相机和补光灯,满足机器人的多目视觉需求。
2. 丰富的机器人专用外设接口
 该芯片集成了大量机器人底盘和控制所需的接口:
该芯片集成了大量机器人底盘和控制所需的接口:
- CAN总线:明确列出支持 CAN x 4。这是工业机器人和移动底盘通信的标配协议,用于控制电机和读取传感器数据。
- 串口与调试:支持 UART x 12,这对于连接激光雷达(Lidar)、IMU(惯性测量单元)、GPS模块等外设非常充裕。
- 低功耗MCU协处理器:内置 RISC-V Nuclei N320 核心。这非常适合用来做机器人的底层实时控制(如电机PID控制),分担主核压力,实现“异构多核”协同工作。
3. 高性能与低功耗平衡
- CPU架构:采用“2x Cortex-A73 + 6x Cortex-A53”的八核架构,兼顾高性能计算和低功耗待机。
- 电源管理:支持 23个独立电源域 和多种低功耗模式。对于依赖电池供电的移动机器人,精细的电源管理能有效延长续航时间。
📊 适配性评估表
| 评估维度 | 适配情况 | 详细说明 |
|---|---|---|
| AI算力 | ⭐⭐⭐⭐⭐ | 4 TOPS NPU支持运行YOLO等算法,支持W4A16非对称运算,适合端侧AI。 |
| 运动控制 | ⭐⭐⭐⭐ | 集成4路CAN和12路UART,可直接驱动电机和连接雷达。 |
| 视觉感知 | ⭐⭐⭐⭐⭐ | 支持8K解码和4K编码,双MIPI CSI接口,适合多目视觉方案。 |
| 系统内存 | ⭐⭐⭐⭐ | 支持LPDDR5(最高5500Mbps),带宽充足,支持16GB大内存。 |
| 显示交互 | ⭐⭐⭐⭐ | 支持HDMI 2.1/eDP,适合带屏机器人(如交互面板、广告屏)。 |
| 存储扩展 | ⭐⭐⭐⭐ | 支持eMMC 5.1、UFS 2.0、SDIO 3.0,可扩展大容量存储记录日志。 |
⚠️ 潜在挑战与注意事项
虽然RK3572非常适合,但在实际开发中需要注意以下几点:
- 实时性限制:
- 版本选择:RK3572会用商用版、工业级、车规级等多个版本可选,务必根据实际业务场景选择合适的版本。
- 引脚资源分配:
- 芯片引脚是复用的(Multiplexing)。在设计底板时,需要仔细规划GPIO,确保CAN、UART和MIPI接口能同时满足,避免资源冲突。
💡 总结与建议
RK3572是一款非常适合中高端机器人开发的SoC芯片。
- 推荐应用场景:服务机器人(送餐/接待)、教育机器人、工业巡检机器人、机器狗、以及需要大屏交互的智能终端。
- 开发建议:利用其RISC-V核处理底层驱动,利用A73/A53集群运行ROS(机器人操作系统)或Android,利用NPU进行视觉算法加速,摄像头采用sensor直连或SerDes芯片组。
如有开发需求,可点击提交,我们提供免费的评估服务。











